Sensors, Free Full-Text
Sensors, Free Full-Text
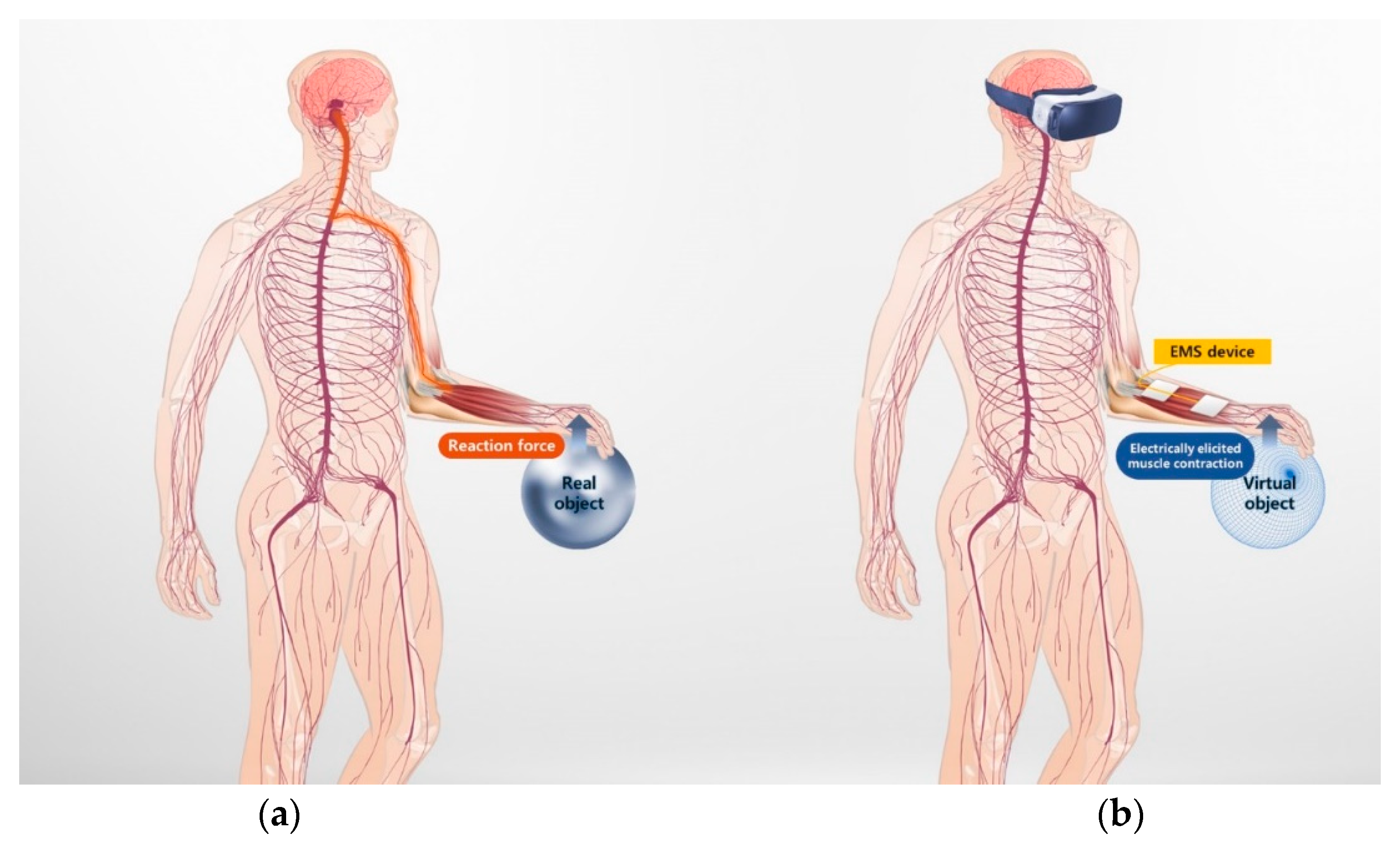
A haptic interface based on electrical muscle stimulation (EMS) has huge potential in terms of usability and applicability compared with conventional haptic interfaces. This study analyzed the force response characteristics of forearm extensor muscles for EMS-based haptic rendering. We introduced a simplified mathematical model of the force response, which has been developed in the field of rehabilitation, and experimentally validated its feasibility for haptic applications. Two important features of the force response, namely the peak force and response time, with respect to the frequency and amplitude of the electrical stimulation were identified by investigating the experimental force response of the forearm extensor muscles. An exponential function was proposed to estimate the peak force with respect to the frequency and amplitude, and it was verified by comparing with the measured peak force. The response time characteristics were also examined with respect to the frequency and amplitude. A frequency-dependent tendency, i.e., an increase in response time with increasing frequency, was observed, whereas there was no correlation with the amplitude. The analysis of the force response characteristics with the application of the proposed force response model may help enhance the fidelity of EMS-based haptic rendering.
Sensor Letters
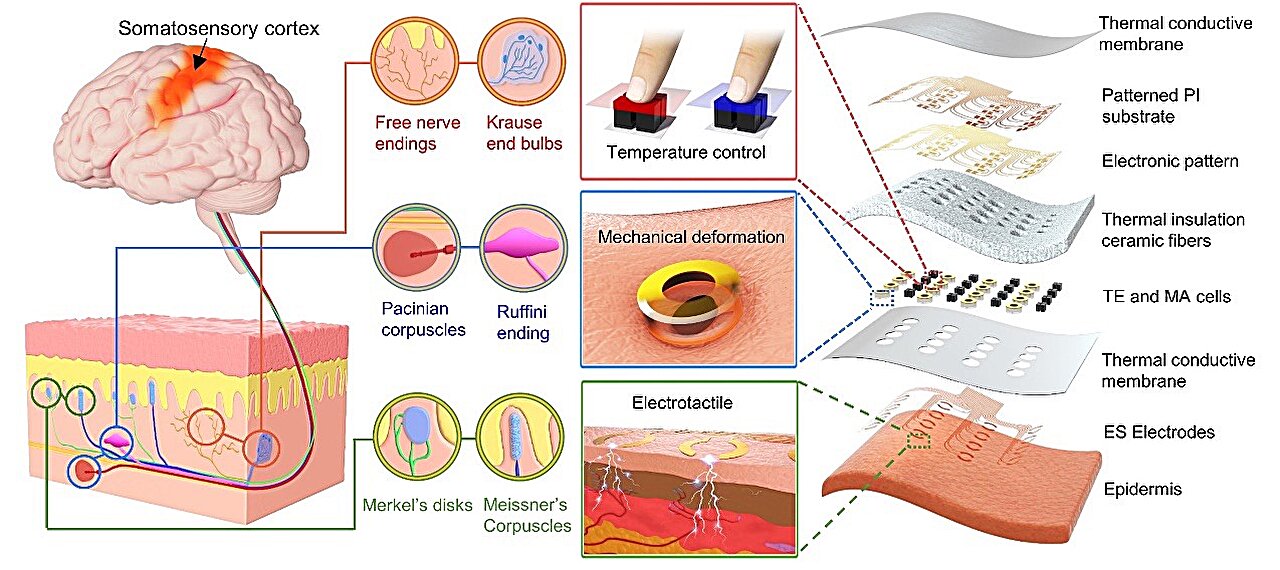
A skin-integrated multimodal haptic interface to produce immersive tactile experiences

Sensors, Free Full-Text
Sensors, Free Full-Text
Sensors, Free Full-Text
Sensors, Free Full-Text
Sensor Letters

Sensors An Open Access Journal from MDPI
Sensors, Free Full-Text
Sensors, Free Full-Text
Sensors, Free Full-Text


